Welcome to LiteGeometry

🌟 About The Project
LiteGeometry is a lightweight C++ library — built on top of Eigen — that delivers high-performance 2D and 3D computational geometry and path-planning utilities.
Whether you're building quick prototypes or deploying models in production, LiteGeometry ensures a fast, reliable, and scalable experience.
ℹ️ Why Use LiteGeometry?
-
Simplicity: Clean and intuitive API design that makes the library easy to use and integrate.
-
Performance: Efficient implementations for common geometry and planning tasks.
-
Utility: A wide selection of common geometric algorithms and advanced path planning techniques.
✨ Key Modules
-
Core Geometry Utilities
Provides fundamental 2D/3D geometry operations, such as:
- Containment queries for points relative to lines, polygons, and polyhedra.
- Exact intersection tests between segments and other shapes (lines, polygons, and polyhedra), including precise computation of intersection points.
-
Advanced Modeling Algorithms
Supports advanced modeling tasks, including:
- Oriented Bounding Box (OBB) construction in both 2D and 3D.
- Rasterization routines for lines, polygons, and polyhedron surfaces.
- A pinhole-camera model for projecting 3D points onto a 2D image plane.
-
Path Planning
Specialized algorithms for efficient pathfinding:
- Two optimized 3D Jump-Point Search (JPS) implementations for large-scale environments.
🛠 Development Environment
This library is actively developed and tested with:
- Compiler: MSVC 2022 (C++17 mode)
- Eigen: 3.4.90
- CGAL: 5.6
- Boost: 1.87.0
- Abseil: 20240116
⚠️ Earlier versions may work but aren't fully validated.
🎓 Examples and tutorials
Explore the extensive collection of examples and tutorials to help you get started with LiteGeometry. You can find them here.
🚀 Quick Start
LiteGeometry defines explicit types for segments, rays, and infinite lines in 2D and 3D:
// -------- 2-D --------
struct Segment2D { Eigen::RowVector2d P1, P2; };
struct Ray2D { Eigen::RowVector2d P1, P2; }; // Direction: P1 ➜ P2
struct Line2D { Eigen::RowVector2d P1, P2; };
// -------- 3-D --------
struct Segment3D { Eigen::RowVector3d P1, P2; };
struct Ray3D { Eigen::RowVector3d P1, P2; }; // Direction: P1 ➜ P2
struct Line3D { Eigen::RowVector3d P1, P2; };
💡Tip: All line-based utilities accept these primitives directly.
Import Header:
#include "LiteGeometry.h"
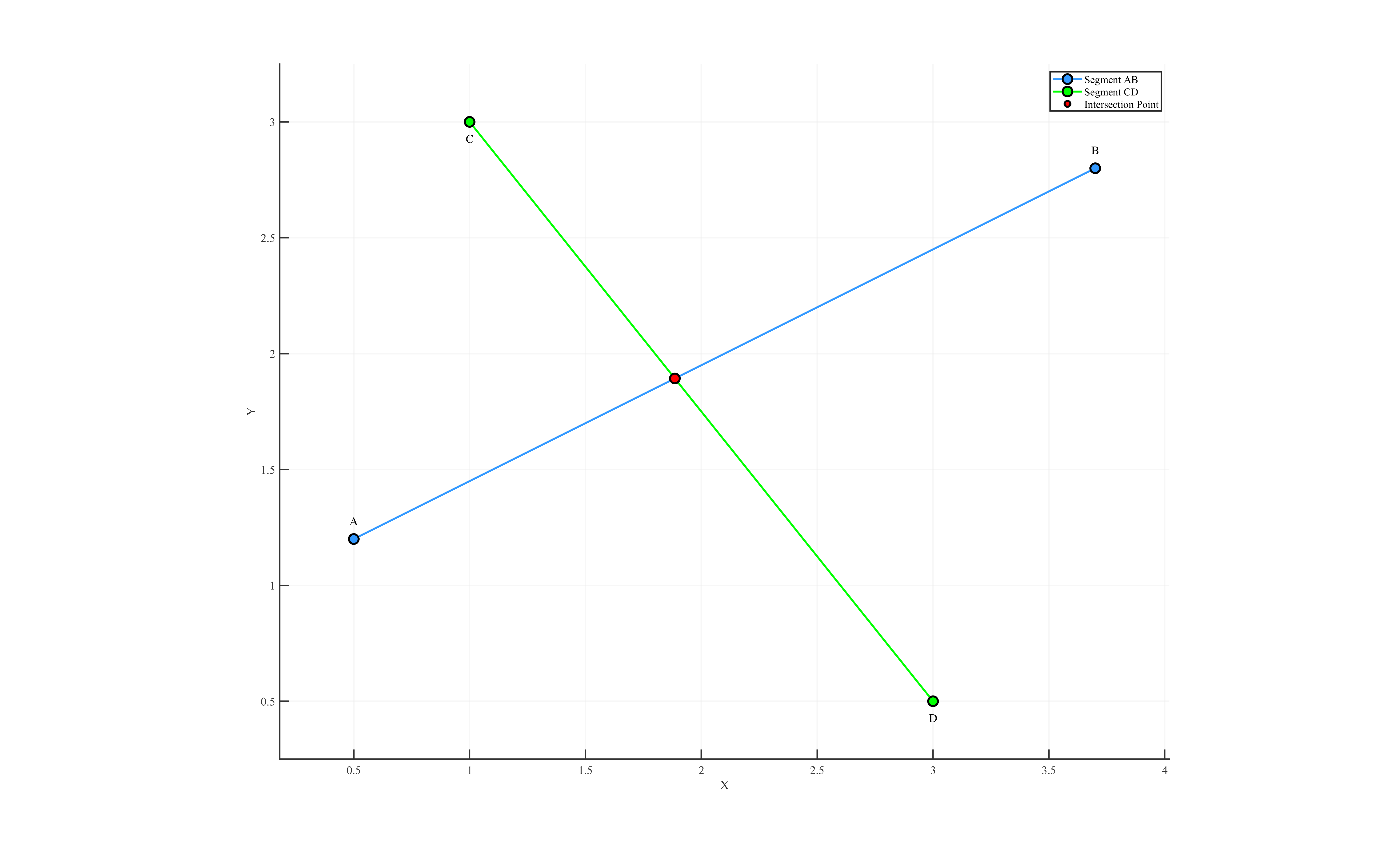
Check if two 2D segments intersect and compute the intersection point:
int main(){
Eigen::RowVector2d A(0.5, 1.2);
Eigen::RowVector2d B(3.7, 2.8);
Segment2D AB{ A , B };
Eigen::RowVector2d C(1.0, 3.0);
Eigen::RowVector2d D(3.0, 0.5);
Segment2D CD{ C , D };
Eigen::RowVector2d intersection;
bool isIntersection = isLinesIntersection2D(AB, CD, intersection);
if (isIntersection) {
std::cout << "Intersection Point:\n"
<< intersection.format(Eigen::FullPrecision) << std::endl;
}
}
Output:
Intersection Point:
1.8857142857142859 1.8928571428571428
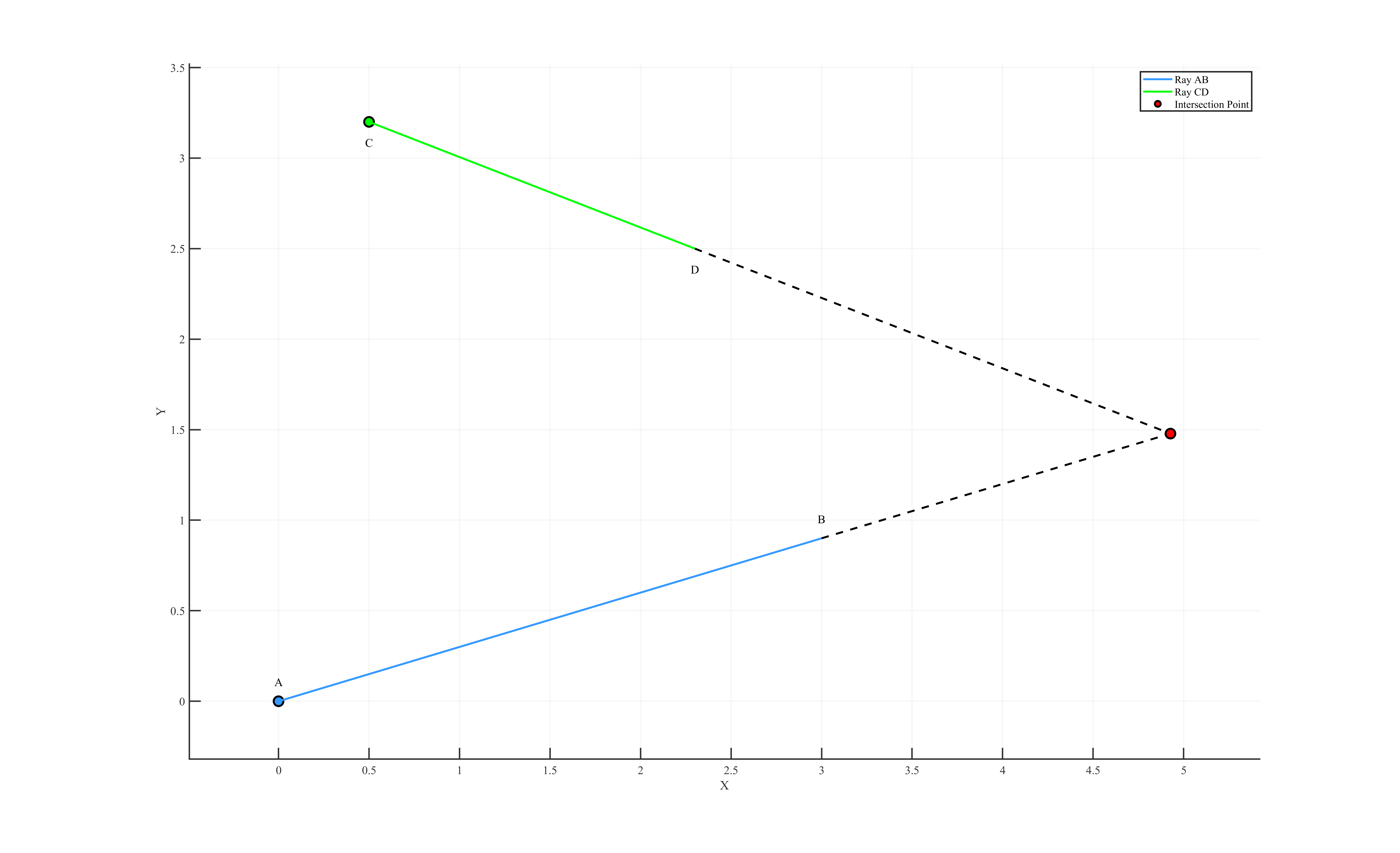
Check if two 2D rays intersect and compute the intersection point:
int main(){
Eigen::RowVector2d A(0.0, 0.0);
Eigen::RowVector2d B(3.0, 0.9);
Ray2D AB{ A , B };
Eigen::RowVector2d C(0.5, 3.2);
Eigen::RowVector2d D(2.3, 2.5);
Ray2D CD{ C , D };
Eigen::RowVector2d intersection;
bool isIntersection = isLinesIntersection2D(AB, CD, intersection);
if (isIntersection) {
std::cout << "Intersection Point:\n"
<< intersection.format(Eigen::FullPrecision) << std::endl;
}
}
Output:
Intersection Point:
4.9274193548387082 1.4782258064516127
📜 License
LiteGeometry software: BSD-3-Clause License